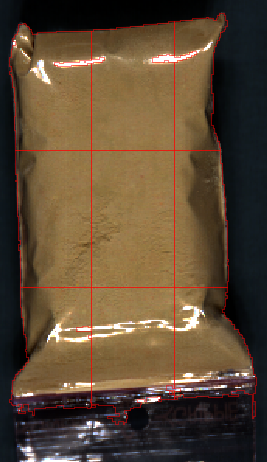
Create a grid on an object. Default settings create a 3x3 grid.
Parameters
Type
-
Grid
-
Choose the size of the grid.
-
-
Area
-
Choose the size of the grid element.
-
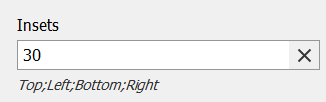
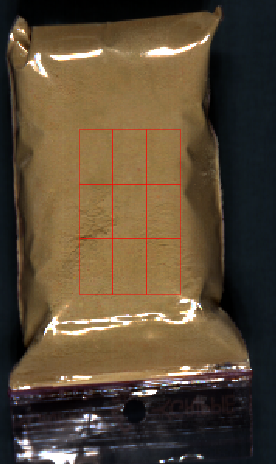
Insets
Choose which pixels are included in the grid.
Formats:
-
4 values
0;0;0;15-
Top;Left;Bottom;Right -
Right hand side of the image is offset byt 15 pixels, other offsets are set to 0
-
-
2 values
0;15-
[Top and Bottom];[Left and Right] -
Top and bottom offset set to 0, left and right set to 15 pixels
-
-
Single value
15-
Top, bottom, left and right offset set to 15 pixels
-
Percent
✅ The insets take away a percentage of the image.
⬜ The insets take away pixels instead of a percentage.
Gap
Specify padding gap between each segments.
Format: Column;Row
X and Y padding.
Min area
The minimum number of pixels for an object to be included.
Max area
The maximum number of pixels for an object to be included.
If 0 no maximum area is defined.
Object filter
Use an expression to further exclude unwanted objects based on shape.
Properties that can be used for the Expression:
-
Area -
Length -
Width -
Circumference -
Regularity -
Roundness -
Angle -
D1 -
D2 -
X -
Y -
MaxBorderDistance -
BoundingBoxArea
For details on each available property see: Object properties Details
Shrink
Takes away x numbers of pixels at the borders of the objects included in images.
Separate
The Separate parameter defines how pixels that pass your segmentation threshold are grouped into distinct object samples.
Pixel Connectivity Rule
Breeze uses 8-connectivity. Pixels are considered connected if they touch horizontally, vertically, or diagonally on a single corner.
Parameter Options
1. Normal
-
Behavior: Standard connected-component grouping.
-
Result: Pixels touching by an edge or corner form a single object. Physically isolated clusters form separate objects.
2. Separate adjacent objects
-
Behavior: Applies a distance transform to find the inner centers (geometric peaks) of pixel clusters, then splits them using a watershed-style growth algorithm.
-
Best Used For: Round or spherical objects that are touching or overlapping.
-
Limitation: Elongated, branched, or irregular shapes may be incorrectly split into multiple objects because the algorithm detects multiple internal peaks within a single physical item.
3. Merge all objects into one
-
Behavior: Disregards spacing; combines all valid pixels across the entire image.
-
Result: Evaluates the entire frame as one single object for collective regional analysis.
4. Merge all objects per row
-
Behavior: Groups detected objects based on the spatial grid of their vertical center points ($Y$-coordinates).
-
Result: All objects residing within the same horizontal row lane are merged into a single object.
5. Merge all objects per column
-
Behavior: Groups detected objects based on the spatial grid of their horizontal center points ($X$-coordinates).
-
Result: All objects residing within the same vertical column lane are merged into a single object.
Applies To
Only visible when applicable
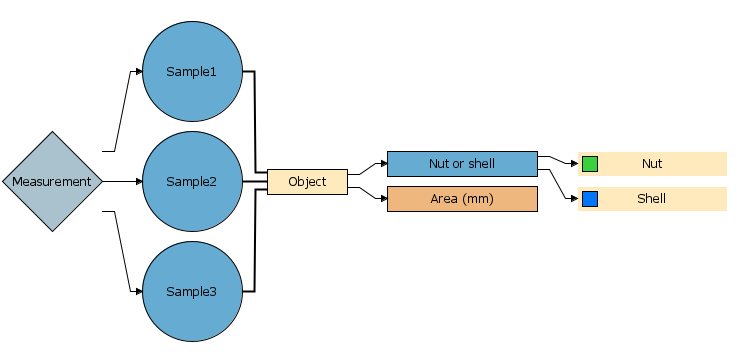
When Applies to is used only objects from the selected segmentation will be used for the next segmentation on the analyse tree.
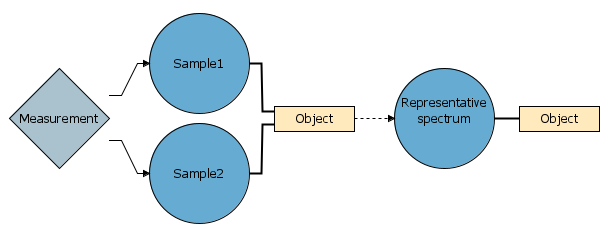
This is denoted by the dashed line from the Object node to the segmentation which only is applied to a subset of all applicable segmentation.
Link
Only visible when applicable
Link output objects from two or more segmentations to top segmentation. Descriptors can then be added to the common object output and will be calculated for objects from all segmentations.
The segmentations must be at same level to be available for linking.