RGB segmentation using pretrained instance segmentation models.
A model will be downloaded when the Analyse Tree is applied for the first time when using a zero-shot model. If the model can not be automatically downloaded for some reason, please see this article for help: Manually download SAM model files
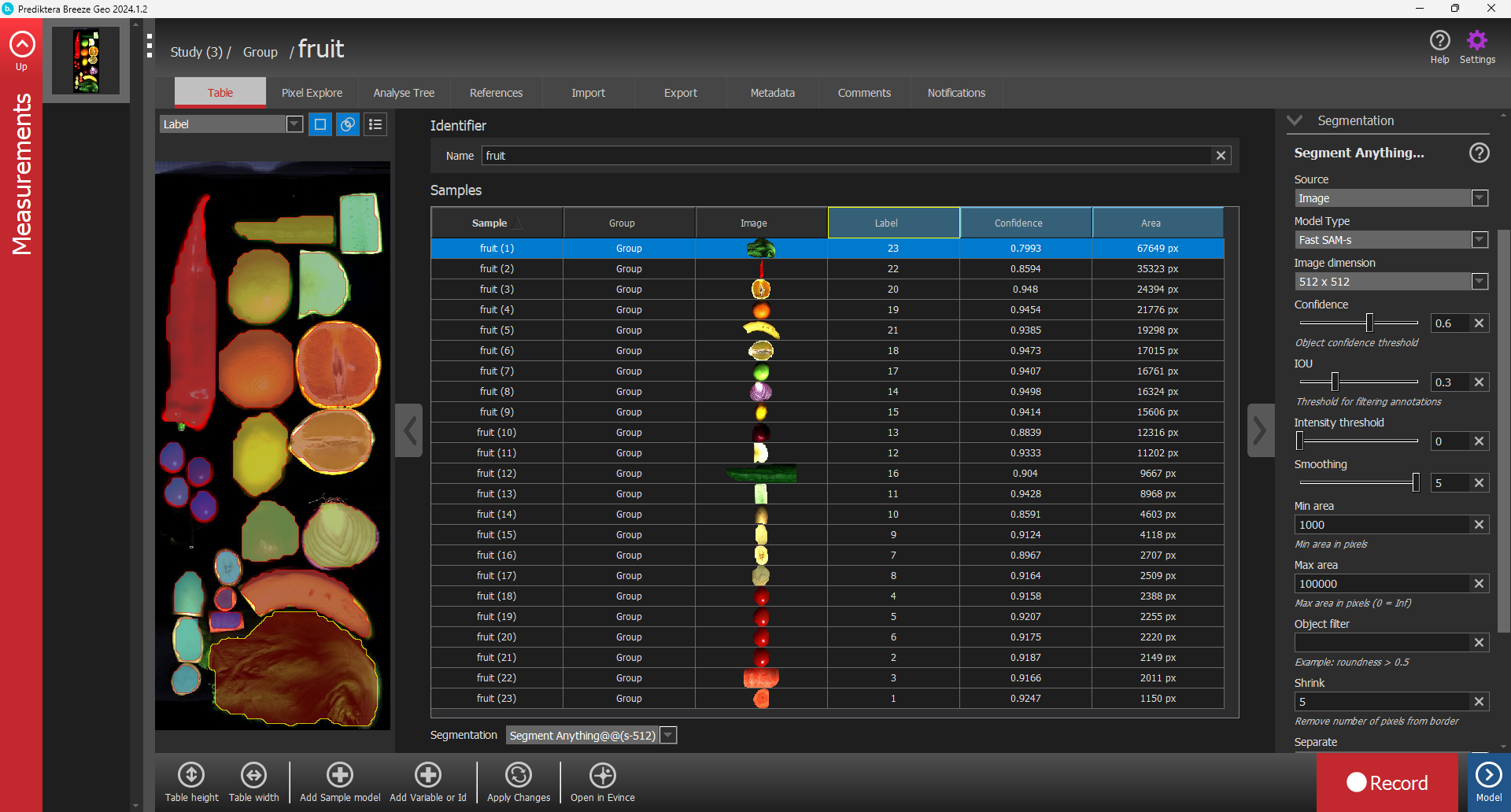
Parameters
Source
On which image source the segmentation should be applied. The pseudo-rgb image or a painted prediction image.
Model Type
Type of model with different sizes.
-
FastSAM-s
-
FastSAM-x
-
YOLOv8
-
YOLO11
Image dimension
Only available for FastSAM (zero-shot models)
Model image input size.
Use a size which is close to the expected spatial resolution of the source image
File
Only available for custom trained models (YOLOv8 and YOLO11)
The .onnx model file to use.
Confidence
Object confidence threshold.
IOU
The Intersection-over-Union (IOU) parameter measures overlap between predicted and true segments, optimizing and evaluating segmentation accuracy.
Intensity threshold
The intensity threshold parameter, ranging from 0 to 1, determines which parts of an image are kept based on intensity. Values below this threshold are discarded, simplifying the image by focusing on higher intensity areas.
Activation function for scores
Activation function to apply to detection scores before thresholding.
-
None
-
Uses raw model outputs without applying any function.
-
-
Sigmoid
-
Squashes values into the range [0, 1], emphasizing probabilities.
-
-
Tahn
-
Maps values into [−1, 1], useful for centered or symmetric outputs.
-
-
ReLU
-
Zeroes out negatives while keeping positive values unchanged.
-
Smoothing
The smoothing parameter controls the amount of blur applied to an image to soften edges and reduce noise, with higher values increasing the blur effect.
Min area
The minimum number of pixels for an object to be included.
Max area
The maximum number of pixels for an object to be included.
If 0 no maximum area is defined.
Object filter
Use an expression to further exclude unwanted objects based on shape.
Operators than can be used expressions include the data operators wNNN and bMMM for referring to wavelength bands, the range operator : used for averaging data, standard arithmetic (+,-,/,* …) and comparison operators (=,>,< …) as well as some mathematical functions (
…) and constants (
).
Breeze does not validate the provided expression until you click Apply changes to apply it to some data.
|
Data Operator |
Description |
|---|---|
|
|
Wavelength lookup operator that finds the wavelength band closest to the provided number A setting controls how far off a wavelength is allowed to be to be considered a match. If there isn’t matching data an error is displayed when applying the workflow to data. Learn more in Wavelength matching. Example of this syntax: |
|
|
Band index operator. If the index |
|
|
Average range operator that returns the average value for a range of wavelength bands. For example: |
Expand to see all available operators
|
Arithmetic Operator |
Description |
|---|---|
|
|
Subtract |
|
|
Add |
|
|
Divide |
|
|
Multiply |
|
|
Modulo |
|
|
Raised to a power |
|
Comparison Operator |
Description |
|---|---|
|
|
Equal to |
|
|
TRUE if any of the conditions separated by OR is TRUE |
|
|
TRUE if all the conditions separated by AND is TRUE |
|
|
Not equal to |
|
|
Less than |
|
|
Less than or equal to |
|
|
Greater than |
|
|
Greater than or equal to |
|
Function operator |
Description |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Constants |
Description |
|---|---|
|
|
Always evaluates to TRUE |
|
|
Always evaluates to FALSE |
|
|
|
|
|
|
Properties that can be used for the Expression:
-
Area -
Length -
Width -
Circumference -
Regularity -
Roundness -
Angle -
D1 -
D2 -
X -
Y -
MaxBorderDistance -
BoundingBoxArea
For details on each available property see: Object properties Details
Shrink
Takes away x numbers of pixels at the borders of the objects included in images.
Separate
The Separate parameter defines how pixels that pass your segmentation threshold are grouped into distinct object samples.
Pixel Connectivity Rule
Breeze uses 8-connectivity. Pixels are considered connected if they touch horizontally, vertically, or diagonally on a single corner.
Parameter Options
1. Normal
-
Behavior: Standard connected-component grouping.
-
Result: Pixels touching by an edge or corner form a single object. Physically isolated clusters form separate objects.
2. Separate adjacent objects
-
Behavior: Applies a distance transform to find the inner centers (geometric peaks) of pixel clusters, then splits them using a watershed-style growth algorithm.
-
Best Used For: Round or spherical objects that are touching or overlapping.
-
Limitation: Elongated, branched, or irregular shapes may be incorrectly split into multiple objects because the algorithm detects multiple internal peaks within a single physical item.
3. Merge all objects into one
-
Behavior: Disregards spacing; combines all valid pixels across the entire image.
-
Result: Evaluates the entire frame as one single object for collective regional analysis.
4. Merge all objects per row
-
Behavior: Groups detected objects based on the spatial grid of their vertical center points ($Y$-coordinates).
-
Result: All objects residing within the same horizontal row lane are merged into a single object.
5. Merge all objects per column
-
Behavior: Groups detected objects based on the spatial grid of their horizontal center points ($X$-coordinates).
-
Result: All objects residing within the same vertical column lane are merged into a single object.
Max objects
Max number of objects in image, takes the first
objects sorted by confidence.
Inverse
✅ Includes the opposite of the sample specified in the model.
⬜ Includes the sample specified from the model.